

中空の回転プラットフォームの回転速度と精度を、高精度アプリケーションに最適化するにはどうすればよいですか?
 2025.04.18
2025.04.18
 業界のニュース
業界のニュース
の回転速度と精度を最適化します 中空のロータリープラットフォーム 高精度のアプリケーションの場合、いくつかの設計およびエンジニアリング要因に注意が必要です。この最適化を実現する方法は次のとおりです。
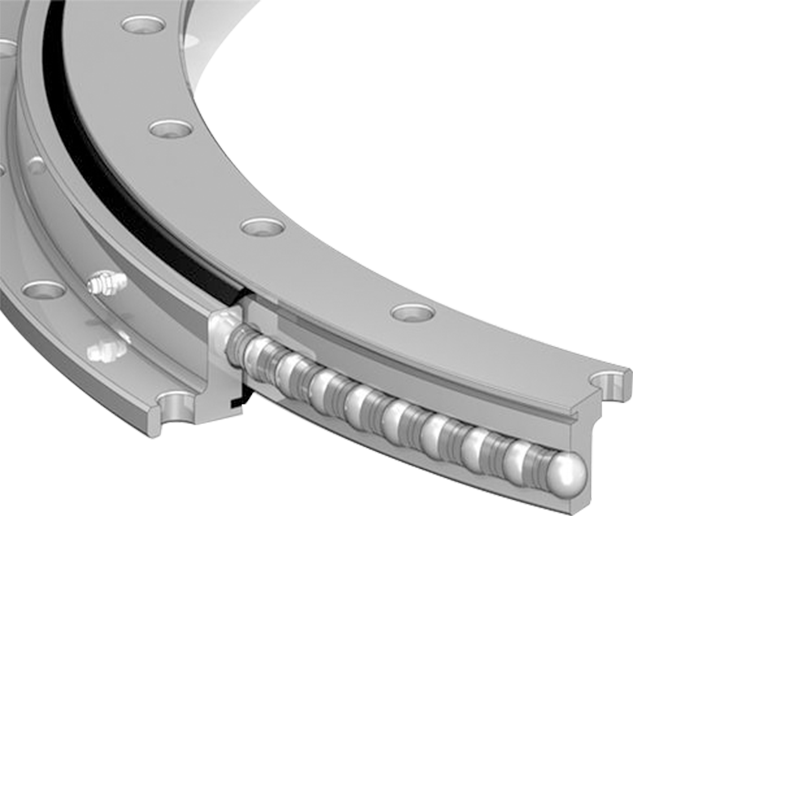
1. 精密ベアリング
-
高品質のベアリング: 精密ベアリングの選択は、摩擦を最小限に抑え、滑らかな回転を確保する上で重要です。セラミックと鋼の組み合わせで作られたセラミックまたはハイブリッドベアリングは、従来の金属ベアリングと比較して、優れた精度、摩耗の削減、高速能力を提供します。
-
プリロードベアリング: ベアリングにプリロードを適用すると、軸方向の遊びを最小限に抑え、プラットフォームの安定性を向上させることができます。これは、特により高い回転速度で、より正確な動きを達成するのにも役立ちます。
2. ドライブシステム
-
サーボモーター: 高精度を必要とするアプリケーションの場合、サーボモーターまたはステッピングモーターを使用すると、回転速度と位置をより正確に制御できます。これらのモーターは、高精度のタスクに不可欠な細かい調整と一貫した回転速度が可能です。
-
閉ループ制御システム: モーター速度を連続的に監視および調整する閉ループ制御システムは、さまざまな負荷の下でも望ましい回転速度を維持できます。これにより、プラットフォームの操作全体で一貫した精度が保証されます。
-
ギアボックスまたは縮小ギアシステム: 回転プラットフォームがより遅い速度で回転する必要があるが、トルクと精度が高い場合、ギアボックスを適切な削減比と統合すると、回転速度と位置の精度を細かく制御できます。
3. フィードバックとセンサー
-
エンコーダ: 高解像度の光学または磁気エンコーダーは、回転プラットフォームの位置と速度に関するフィードバックを提供し、リアルタイム調整が精度を維持できるようにします。これらのエンコーダーは、位置と速度の微小な変化を検出することができ、プラットフォームのパフォーマンスを微調整できます。
-
線形可変微分変圧器(LVDT): 非常に高精度のアプリケーションの場合、LVDTを使用して、プラットフォームの位置または動きのシフトを監視できます。これらのセンサーは、プラットフォームの回転に関するサブミクロンレベルのフィードバックを提供できます。
-
閉ループフィードバックシステム: モーターとエンコーダーと統合されたこれらのシステムにより、継続的な調整が可能になり、回転速度と位置が操作全体で高精度で維持されるようにします。
4. 構造設計と材料の選択
-
低重量および高強度材料: プラットフォーム構造にアルミニウム合金、炭素繊維、または軽量金属などの材料を使用すると、慣性が低下し、速度と精度の両方が向上します。これらの材料は、振動の減少と回転中の動的応答の向上にも寄与します。
-
変形の最小化: プラットフォームの構造的完全性を確保することは、精度を維持するために不可欠です。プラットフォームの屈曲やワーピングを減らすために、堅牢で剛性のある材料と慎重な設計を使用すると、高速回転中の潜在的なエラー源が最小限に抑えられます。
5. 振動減衰
-
減衰システム: 振動は、特に高い回転速度での精度に影響を与える重要な要因になる可能性があります。粘弾性材料、振動アイソレーター、アクティブ減衰デバイスなどの減衰システムを組み込むと、外部振動や内振動の影響が減少する可能性があります。
-
バランス: プラットフォームの適切なバランスは非常に重要です。小さな不均衡でさえ、精度を低下させる振動につながる可能性があるためです。製造プロセス中の動的バランスは、すべての回転速度でプラットフォームがスムーズに動作することを保証します。
6. 熱管理
-
冷却システム: 回転速度が高いと熱が発生し、熱膨張を引き起こし、精度に影響を与える可能性があります。アクティブ冷却システム(ファンや液体冷却など)またはパッシブ冷却技術(ヒートシンクなど)を使用すると、熱効果がプラットフォームのパフォーマンスに影響を与えるのを防ぐことができます。
-
熱補償: 一部の高精度ロータリープラットフォームは、熱膨張の係数が低い材料、または温度誘導変化を補うことができるシステムで設計されており、さまざまな温度条件でもプラットフォームが精度を維持することを保証します。
7. コントロールソフトウェアとアルゴリズム
-
高度な制御アルゴリズム: リアルタイムフィードバックに基づいてモーター速度、トルク、および位置を動的に調整する洗練されたアルゴリズムを実装することで、回転速度を最適化し、正確な制御を確保できます。これらのアルゴリズムは、外乱、摩擦、負荷の変動によって引き起こされるエラーを減らすのに役立ちます。
-
PID(比例統合誘導性)制御: 微調整PIDコントロールループは、速度と位置をより適切に制御し、リアルタイムで小さなエラーを修正し、全体的な精度を向上させることができます。これらの制御システムは、目的の回転と実際の回転の間のエラーを最小限に抑えるために、パラメーターを継続的に調整します。
8. 回転安定性
-
ジャイロスコープ効果: 回転速度が高いと、動きの精度に影響を与える可能性のあるジャイロスコープ効果を引き起こす可能性があります。これらの効果を設計(カウンターウェイトの使用や安定化システムなど)を介してカウンターすると、プラットフォームの安定性と回転精度を維持することができます。
-
ダイナミックバランス: 中空のロータリープラットフォームの設計は、不均衡が高速での精度と滑らかな動作に悪影響を与える遠心力につながる可能性があるため、質量の分布がバランスが取れていることを保証する必要があります。
9. 潤滑
-
高度な潤滑システム: 適切な潤滑は、特に高い回転速度で、移動成分の摩擦と摩耗を最小限に抑えるために不可欠です。高品質の潤滑剤を使用して、それらを制御された方法で適用する(たとえば、自動潤滑システムを介して)、一貫した性能と寿命を確保することができます。
-
グリース対オイル: 高速アプリケーションの場合、粘度、熱安定性、および運用環境との互換性に基づいた適切な潤滑(オイルまたはグリース)を選択することは、滑らかで正確な動きを維持するために重要です。
10. 外部システムとの統合
-
他の機器との同期: 一部のアプリケーションでは、中空の回転プラットフォームを他の機械またはロボットアームと同期する必要がある場合があります。通信プロトコルまたはネットワークコントロールを介して外部システム(コンベアやCNCマシンなど)との互換性と同期を確保することは、正確な動きと操作を維持するのに役立ちます。

Jiangsu Manchen Transmission Technology Co.、Ltd。は、多様な産業向けにカスタムで信頼性が高く、正確な滑りのベアリングを作成し、最高水準を満たし、共同の機会を求めて継続的に革新します。中国の信頼性の高い安定した滑りのベアリングサプライヤー。
製品リンク
お問い合わせ
-
Address:No. 8、Nanqiu Road、Huangtu Town、Jiangyin City、China
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
