

アプリケーションに適した水平旋回ドライブを選択するにはどうすればよいですか?
 2026.05.13
2026.05.13
 業界のニュース
業界のニュース
適切な水平旋回ドライブの選択は、表面的には単純そうに見える決定事項の 1 つですが、アプリケーションの要件を深く掘り下げると、すぐに複雑な層が明らかになります。不適切な選択はパフォーマンスを低下させるだけでなく、早期に障害が発生し、メンテナンスの負担が生じ、安全性が重要なシステムではコストのかかるダウンタイムや事故を引き起こす可能性があります。このガイドでは、意味のあるすべての選択変数について説明し、エンジニアや調達スペシャリストに最初から適切な判断を下すための実践的なフレームワークを提供します。
水平旋回ドライブの実際の動作
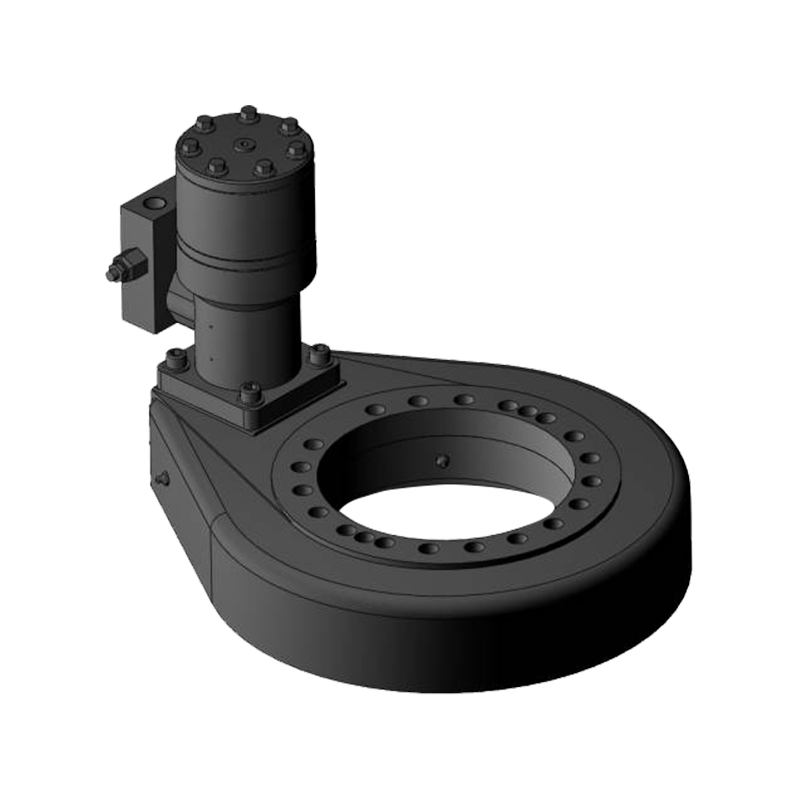
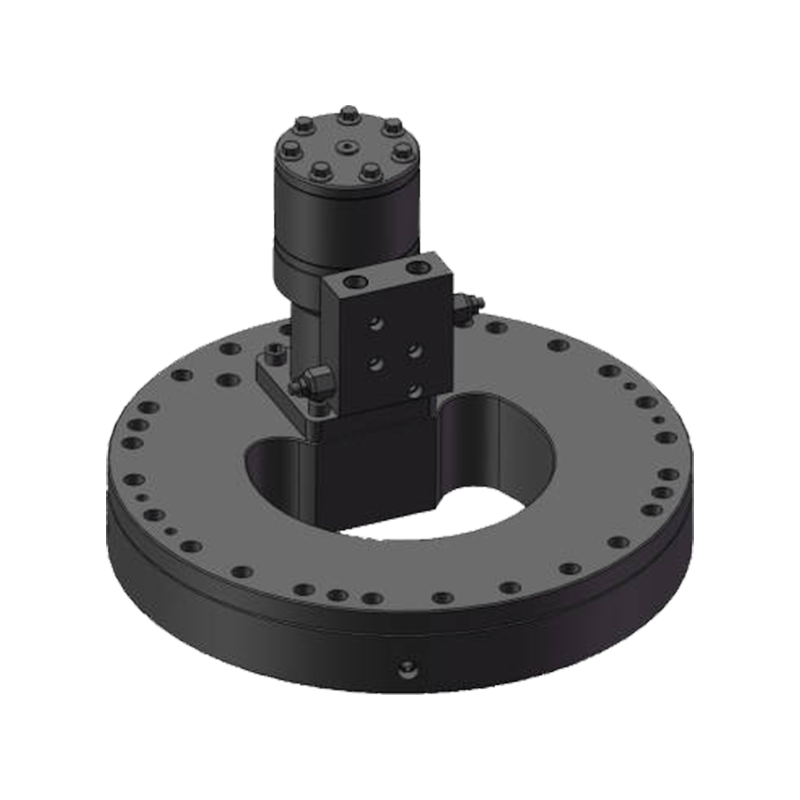
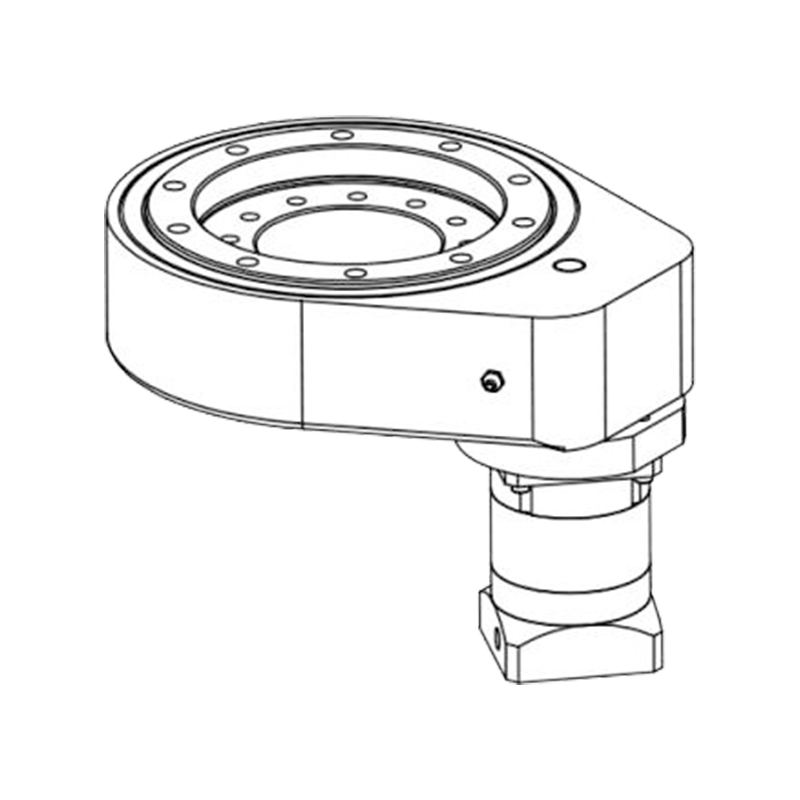
水平旋回ドライブは、ウォームギア減速機構と旋回リングベアリングを単一の統合ハウジング内に組み合わせた完全密閉型ロータリーアクチュエータです。旋回リングは、上記の回転構造によって課せられるラジアル荷重、アキシャル荷重、モーメント荷重に対処し、ウォーム ギアは比較的小さなモーター入力で回転を駆動するのに必要な機械的利点を提供します。 「水平」とは、ドライブの出力軸の方向を指します。回転は垂直軸の周りで発生するため、構造物が水平面内でスイング、パン、または継続的に回転する必要があるアプリケーションでは自然な選択となります。
外部ギアボックスと組み合わせた独立型旋回リングとは異なり、統合された水平旋回ドライブにより、設置が簡素化され、シールの完全性が向上し、周囲の構造の設計に必要なエンジニアリングの労力が軽減されます。この統合がまさに、ソーラー トラッカー、クレーン ターンテーブル、高所作業プラットフォーム、風力タービン ヨー システム、衛星アンテナ ポジショナーなど、高負荷容量を備えたコンパクトで自己完結型の回転駆動が必要とされるアプリケーションで優位に立つ理由です。
負荷分析: 交渉の余地のない出発点
すべての水平旋回ドライブの選択は、完全な負荷分析から始まります。このステップを省略したり、近似したりすることは、早期故障の最も一般的な原因です。ドライブが同時に処理する必要がある負荷には 3 つのカテゴリがあり、カタログ比較を開始する前に 3 つすべてを定量化する必要があります。
アキシアル荷重
アキシャル荷重はドライブの出力軸と平行に作用します。水平旋回ドライブでは、これは通常、上部の回転構造の自重です。ソーラー パネル アレイ、クレーンのターンテーブル上部構造、またはアンテナ アセンブリはすべて、ドライブを通じて下向きに重量を加えます。これは計算するのが最も簡単な負荷です。基本的に、ドライブの上で回転するすべてのものの総質量に重力加速度を乗算し、キロニュートンで表します。
ラジアル荷重
ラジアル荷重は出力軸に対して垂直に作用します。水平旋回ドライブの場合は水平に作用します。大型パネルまたはアンテナにかかる風圧は、屋外用途におけるラジアル荷重の最も一般的な発生源です。回転アセンブリの重心の偏心によって生じる偏心荷重も、ラジアル成分に寄与します。ラジアル荷重は動的で方向的に変化することが多いため、平均値の計算よりもピーク値の推定が重要になります。
ひっくり返る瞬間
転倒モーメントは、ドライブ ハウジングに対して回転構造を傾けようとする曲げ荷重です。これは、回転アセンブリの重心がドライブの回転中心線の真上にない場合、または水平方向の力 (風など) がドライブの取り付け面より上の高さに作用する場合に発生します。転倒モーメントはキロニュートン メートルで表され、多くの場合、最も要求の厳しい負荷パラメーターです。アキシャルおよびラジアル荷重のチェックに合格した多くのドライブは、転倒モーメント容量に関して不合格となります。
トルク要件とモーターのサイズ設定
負荷が確立されたら、必要な出力トルクを計算する必要があります。これは、すべての抵抗力に打ち勝ち、許容可能な時間内に負荷を必要な回転速度まで加速するためにドライブの出力リングで必要なトルクです。必要なトルクの主な要因は、旋回リング ベアリング内の摩擦 (軸方向の荷重と転倒モーメントによって増加します)、回転構造の空気抵抗、および加速段階で必要な慣性トルクです。
水平旋回ドライブ は定格保持トルクと定格作動トルクによって指定されますが、これらは同じ数値ではありません。保持トルクは、ドライブが回転せずに耐えることができる最大静的負荷です。作動トルクは、動作中に利用可能な連続トルクです。ウォーム ギアのセルフ ロック特性 (リード角が摩擦角未満の場合、通常はギア比が約 20:1 を超える場合) は、多くの水平旋回ドライブが別個のブレーキなしで負荷がかかった状態でも位置を保持できることを意味します。この機能は、モーターを継続的に通電することなく風荷重に対してドライブが風荷重に対してパネルの角度を保持する必要があるソーラー トラッカーなどの用途におけるシステム設計を簡素化します。
モーターの選択は、必要な入力トルク (駆動効率を調整した出力トルクをギア比で割ったもの) と必要な入力速度 (出力回転速度にギア比を掛けたもの) に基づいて行われます。ほとんどの水平旋回ドライブは標準の IEC または NEMA フレーム モーターを受け入れ、多くは機械加工されたモーター取り付けフランジを備えたモーター対応の状態で供給されます。
主要な選択パラメータの比較
| パラメータ | 何を決めるか | 共通範囲 | 指定が不十分な場合の選択リスク |
| アキシアル荷重 Capacity | 総回転質量×重力 | 5kN~2,000kN | 軸受軌道面の変形、焼き付き |
| ひっくり返る瞬間 | 偏心荷重×モーメントアーム | 0.5kNm~500kNm | リングギアの歯の破損、傾き |
| 作動トルク | 摩擦抵抗慣性トルク | 0.5kNm~200kNm | モーターの過負荷、ウォームギアの摩耗 |
| 出力速度 | 必要なスルーレート (°/min または rpm) | 0.01~10rpm | 位置決め誤差、サーマルオーバーラン |
| ギア比 | セルフロックの必要性と効率性 | 20:1 – 100:1 | バックドライブ、ブレーキ必須 |
環境とデューティサイクルの考慮事項
机上の機械的負荷要件を満たしているドライブであっても、環境仕様が間違っていると、早期に故障する可能性があります。水平旋回ドライブは、多くの場合過酷な条件下で屋外に広く配備されており、ハウジング、シーリング、表面処理は動作環境に適合する必要があります。
- IP 評価: 屋外用途の場合、通常、粉塵や噴流水を排除するために、最低 IP65 が必要です。海洋または沿岸環境では、ステンレス鋼の留め具と露出した表面の追加の腐食保護を備えた IP67 以上が要求されます。 IP 定格が、モーター インターフェイスを含む完全に組み立てられたドライブに適用されることを確認します。一部のドライブはハウジングで IP65 定格を受けていますが、進入点となるモーター取り付け面が保護されていません。
- 温度範囲: 標準潤滑剤は、-20°C ~ 80°C の範囲で良好に機能します。北極環境、砂漠の施設、または工業用熱源の近くでの用途には、指定された低温または高温グリースが必要です。極度の気候での展開のための選択を最終的に行う前に、ドライブのメーカーの潤滑剤の仕様とその潤滑剤がカバーする温度範囲を確認してください。
- デューティサイクル: 水平旋回ドライブ in solar tracking applications typically operate intermittently — a brief movement every few minutes — placing low thermal demands on the worm gear assembly. Drives used in continuous-rotation applications such as antenna positioners or turntables face much higher thermal loads and require duty cycle ratings (expressed as operating time percentage) that match the application. Exceeding the duty cycle rating leads to lubricant degradation and accelerated worm gear wear.
- 腐食保護: 標準ドライブは、内陸環境に適したリン酸亜鉛下塗りおよび塗装済みのスチール製ハウジングを使用しています。沿岸および沖合の設置では、現場の腐食性カテゴリに応じて、溶融亜鉛メッキハウジング、ステンレス鋼出力リング、またはエポキシコーティングされた表面が必要です。
取り付け構成とインターフェイスの形状
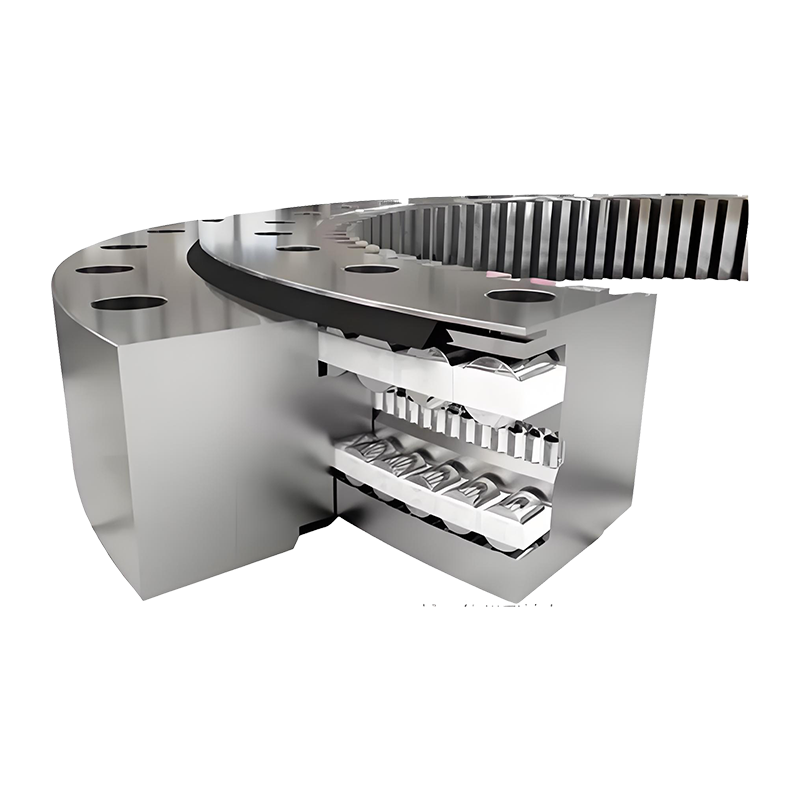
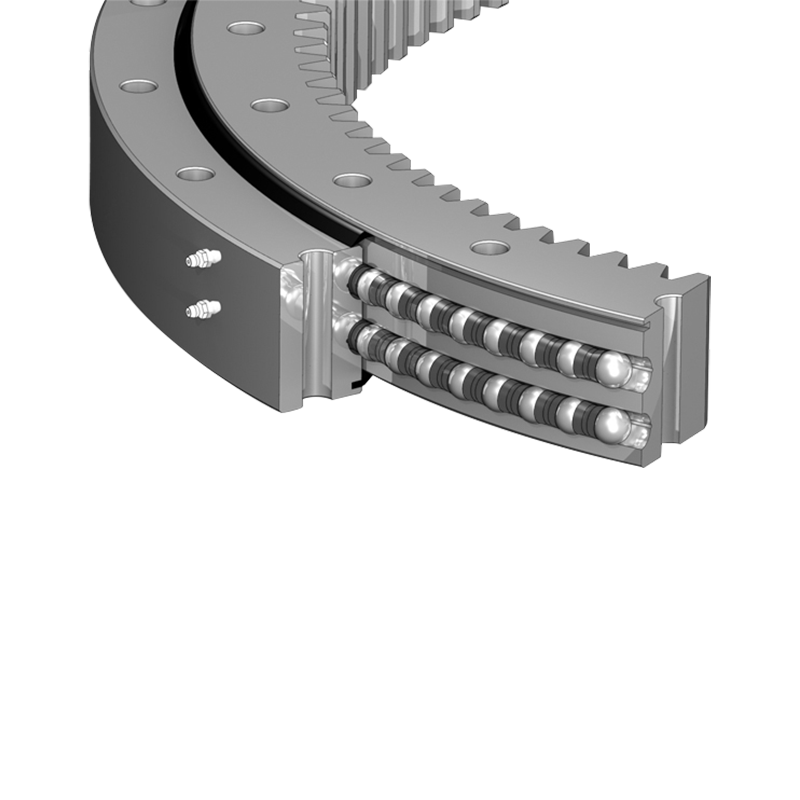
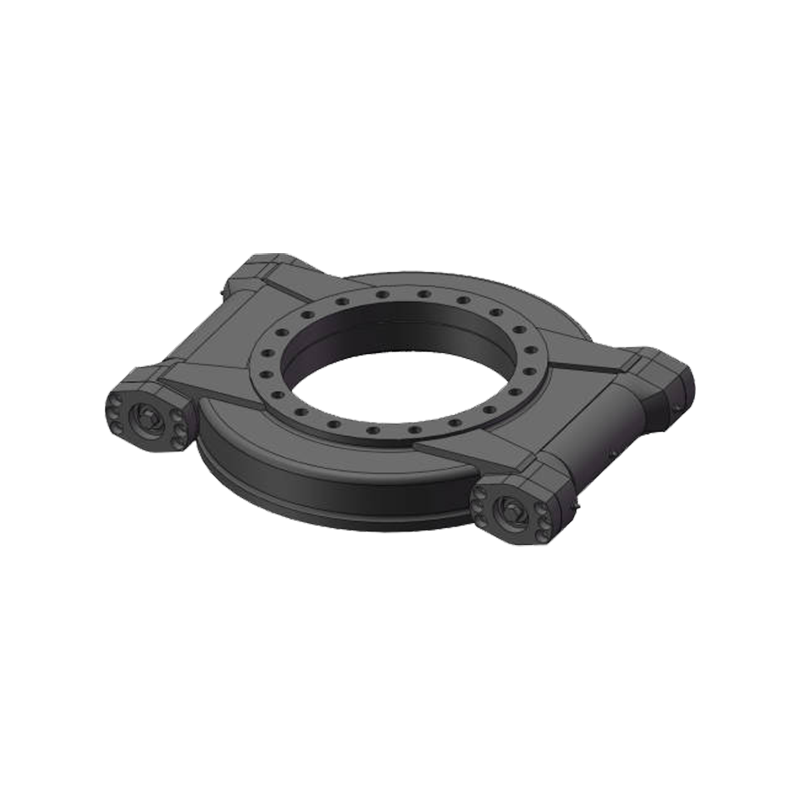
旋回ドライブを周囲の構造物に物理的に統合することは実際的な制約であり、設置時ではなく選択時に解決する必要があります。水平旋回ドライブは、外歯車 (出力リングの外側の歯)、内歯車 (内側の歯)、歯なし (摩擦駆動または直接接続) など、さまざまな出力リング構成で利用でき、それぞれが異なる運動学的配置に適しています。外歯車出力リングが最も一般的で、ウォーム シャフトをリング直径の外側に配置できるため、メンテナンスのためにモーターとギアボックスにアクセスできるようになります。内部ギア構成は、ドライブをコンパクトな回転アセンブリに統合する必要がある場合に使用されます。
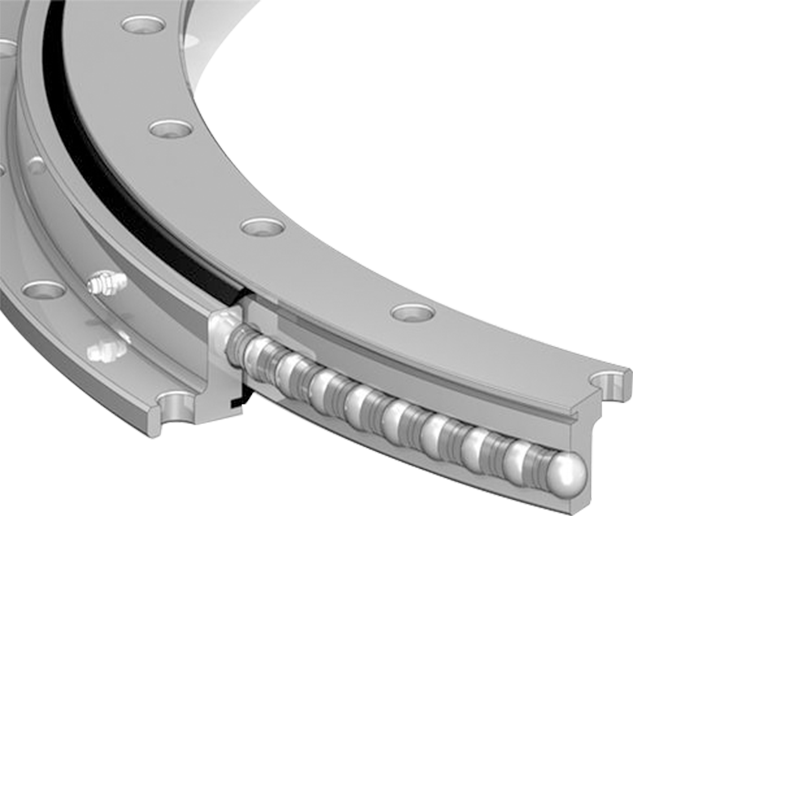
固定ハウジングと回転出力リングの両方のボルト円寸法を、嵌合構造に対して検証する必要があります。多くのメーカーは、カスタマイズされたボルト パターン、取り付けフランジ、出力シャフト インターフェイスを標準オプションとして提供しています。注文段階でこれらを指定する方が、現場でアダプターを加工するよりもはるかに安価です。ケーブル、油圧ライン、または空気圧ホースがドライブの中心を通過する必要がある場合は、貫通穴の直径も確認してください。すべての水平旋回ドライブに中心穴があるわけではなく、この機能を後付けすることはできません。

安全係数と期待耐用年数
水平旋回ドライブの公表されている定格荷重は通常、静的耐荷重または動的疲労寿命の計算に基づいており、計算された動作荷重を上回る適切な安全係数を適用することが標準的なエンジニアリング手法です。安全性が重要ではないほとんどの用途では、作動トルクと負荷容量に対する安全率 1.5 倍から 2 倍が適切です。高所作業台、医療用位置決め装置、車載クレーンなど、ドライブの故障が人員に危険を及ぼす用途の場合は、3 倍以上の安全率が指定される場合があり、関連する機械安全規格 (クレーンの EN 13000 や農業機械の ISO 11684 など) に対する第三者認証をドライブのメーカーに確認する必要があります。
予想される耐用年数は、L10 ベアリング寿命 (同一のドライブの母集団の 10% がベアリングの疲労破壊を示すと予想される運転時間数) とウォーム ギアの表面疲労寿命の観点から議論する必要があります。太陽光追跡アプリケーションの場合、設計寿命は 25 年が業界標準です。メーカーの L10 寿命計算が、一般的な基準条件ではなく、アプリケーションの実際の動作負荷プロファイルに基づいていることを確認してください。
選択を確定する前の実用的なチェックリスト
- 最悪の条件下でのアキシアル荷重、ピークラジアル荷重、最大転倒モーメント(通常は最大風速と最大偏心荷重の組み合わせ)を確認します。
- 選択したドライブの定格作動トルクが、計算された必要な出力トルクを、選択した安全率によって超えていることを確認します。
- 受動的位置保持が必要な場合はセルフロックのギヤ比を確認し、そうでない場合はブレーキ仕様を確認してください。
- IP定格、温度範囲、腐食保護が設置環境に適合していることを確認してください。
- ボルトの円の寸法、出力リングの構成、および中心穴の要件を嵌合構造の設計と照らし合わせて検証します。
- カタログ参照条件ではなく、実際のアプリケーションの荷重プロファイルに基づいて L10 ベアリングの寿命計算をリクエストしてください
- モーターインターフェースの互換性を確認 - フレームサイズ、シャフト直径、取り付けフランジ規格 (IEC または NEMA)
- 計画されたメンテナンス スケジュールに照らして潤滑仕様と再グリース補給間隔を確認します。
水平旋回ドライブを選択すると、系統的な分析が得られます。ドライブ自体は堅牢で実績のあるコンポーネントです。現場で発生する障害は、ほとんどの場合、指定不足の負荷パラメータ、環境定格の不一致、またはインターフェイス制約の見落としが原因であると考えられます。上記の各変数を体系的に検討し、アプリケーション条件が異常な場合にはメーカーのエンジニアリング サポートを利用してください。その結果、ドライブが駆動するシステムの意図された耐用年数の間、確実に動作するドライブが得られます。

Jiangsu Manchen Transmission Technology Co.、Ltd。は、多様な産業向けにカスタムで信頼性が高く、正確な滑りのベアリングを作成し、最高水準を満たし、共同の機会を求めて継続的に革新します。中国の信頼性の高い安定した滑りのベアリングサプライヤー。
製品リンク
お問い合わせ
-
Address:No. 8、Nanqiu Road、Huangtu Town、Jiangyin City、China
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
